За те доли секунды до того момента, как вы возьмете какой-нибудь объект в руку, ваш мозг рассчитает все возможные комбинации движений, необходимые для того чтобы безопасно и надежно схватить и переместить предмет. Такая подсознательная функция мозга развивается у человека с детства в процессе обучения. Результат аналогичного подхода к обучению продемонстрировала немецкая компания Festo, занимающаяся производством промышленного оборудования и систем автоматизации. Компания представила новую роботизированную руку BionicSoftHand, которая не только обладает удивительной гибкостью, но еще и использует искусственный интеллект для расчета правильного алгоритма манипуляций объектами до того момента как, собственно, их берет.

BionicSoftHand – это очередной пример «мягкого» подхода в робототехнике. Роботы, использующиеся на производстве для перемещения тяжелых объектов, выполнены из стали и работают на базе мощных пневматических систем, делающих их сильными и быстрыми, но совсем неделикатными. Контакт машины с человеком в момент ее работы чаще всего заканчиваться плачевными последствиями для последнего. В свою очередь так называемые мягкие роботы используют в своей конструкции преимущественно более гибкие материалы, например, «умные» ткани или надувные части. Поэтому взаимодействие с ними существенно менее травмоопасно.
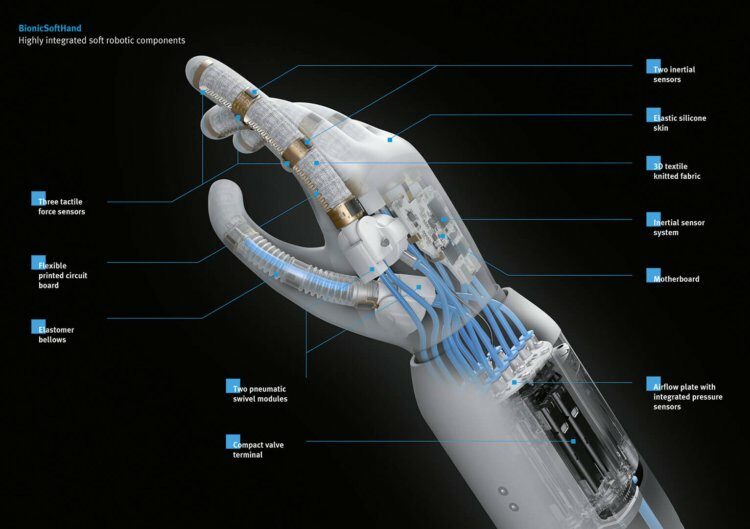
Для максимальной безопасности Festo не использует в новой роботизированной руке твердую скелетную структуру. Вместо этого она оснащена надувными сильфонами, вокруг которых располагается созданная с помощью технологии 3D-печати трехмерная ткань из эластичных волокон, которая изгибается вместе с движениями руки, когда в сильфоны подается воздух. Другими словами, если упростить, похоже все это больше на работу наших мышц и сухожилий.
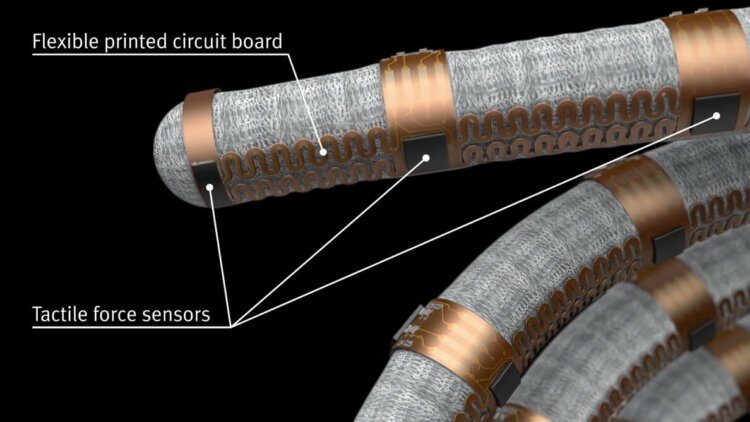
Мягкие пальцы роботизированной руки BionicSoftHand оснащены датчиками инерции (движения) и силы, также созданными на базе гибких материалов, способных изгибаться в момент движения. Сенсоры обеспечивают обратную связь с системами управления рукой, сообщая о совершаемых движениях самой руки и пальцев, а также контакте с объектом. Кроме того, они передают информацию о том, правильно ли расположен объект в руке для его манипуляции. Другими словами, комплекс датчиков наделяет руку контактным восприятием, имитирующим наше чувство осязания.
Обычно производственные роботизированные манипуляторы программируют таким образом, чтобы они могли выполнять бесконечное число определенных специфических движений. Конечно в их системах допускается некоторая доля вариантного выполнения задачи, но в основном вся их работа сводится к одинаковому набору манипуляций с объектами, например, перемещением их из одного места в другое.
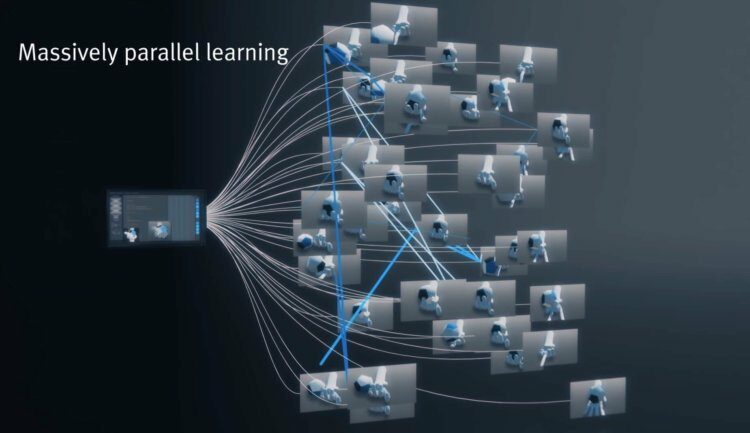
BionicSoftHand в этом плане больше «похожа на человека»: перед началом манипуляции объектом ее система искусственного интеллекта самостоятельно перебирает все возможные комбинации того, как правильно взять объект, как его повернуть и положить обратно. Для этого она использует комплексную виртуальную симуляцию, в которой методом проб и ошибок подбирает правильный вариант дальнейшего действия. Будучи ребенком, вы, наверное, раз 100 роняли чашку с каким-нибудь напитком, пока не научились ее правильно держать. Так вот, BionicSoftHand выполняет то же самое, только в виртуальной среде, перебирая миллиарды ошибочных вариантов и в конечном итоге находя наиболее правильный и оптимальный. За доли секунды.

